
|
I am a fourth-year PhD candidate in Computer Science at Rutgers University, advised by Prof. Abdeslam Boularias.
Before joining Rutgers, I worked at Previously, I earned a Master's at University of California San Diego (UCSD), advised by Prof. Ken Kreutz-Delgado. I earned a Bachelor at University of Science and Technology of China (USTC).
Google
Scholar
•
GitHub
|
 Microsoft and
Microsoft and
 Face++ as a
machine learning
engineer.
Face++ as a
machine learning
engineer.
 [2026.02] My paper
Glove2hand got accepted to CVPR 2026 🎉
[2025.08] My paper
Motion Blending Gaussian Splatting got accepted to CoRL 2025 🐻
[2025.06] I joined
Meta Reality Lab as a research intern 🐷
[2025.03] My paper
Autoregressive Policy got accepted to RA-L 2025 🐶
[2026.02] My paper
Glove2hand got accepted to CVPR 2026 🎉
[2025.08] My paper
Motion Blending Gaussian Splatting got accepted to CoRL 2025 🐻
[2025.06] I joined
Meta Reality Lab as a research intern 🐷
[2025.03] My paper
Autoregressive Policy got accepted to RA-L 2025 🐶
|
|
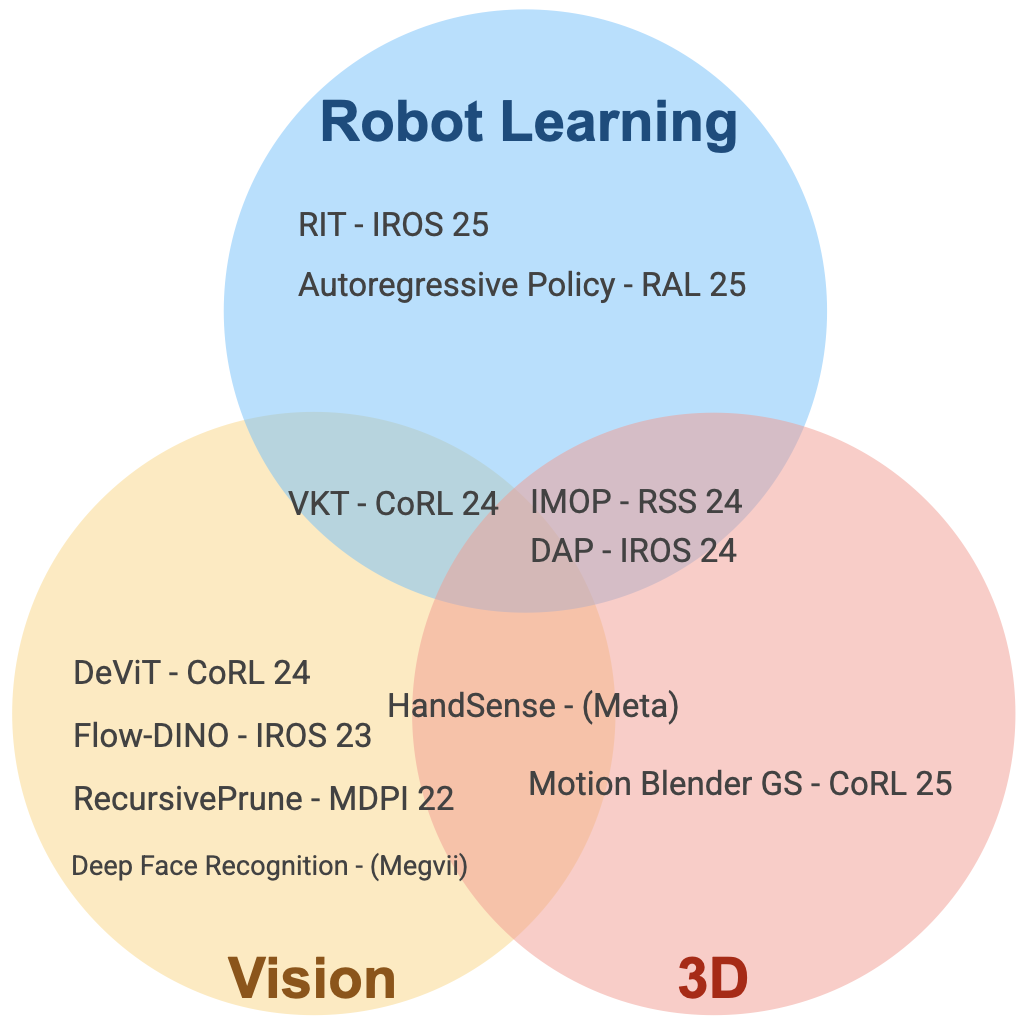
During my PhD, I have published seven independent first-author papers in top-tier robotics and vision conferences, including CVPR, RSS, RA-L, CoRL, and IROS. These works have received hundreds of stars at GitHub. My research focuses on bringing 3D/4D understanding to robotic policy and world modeling. My publications span robot manipulation policy learning, computer vision, 3D reconstruction, and video generation. |
|
Camera Ready PDF and Dataset Coming Soon
|
 Meta Reality
Lab
Meta Reality
Lab|
|
|
|
|
|
|
|
|
|
|
Haonan Chang, Kowndinya Boyalakuntla, Yuhan Liu, |
|
|
|
|
|
Mengting Chen, Yuxin Fang, Xinggang Wang, Heng Luo, Yifeng Geng, |
|
Layout from Baichuan Huang. Last update on Oct 2024 |